Author Peter "shawty" Shaw
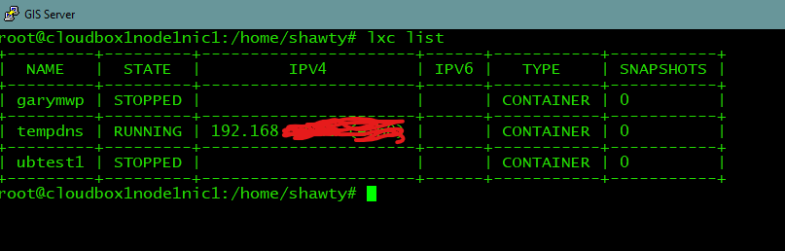
Converting Containers from Proxmox-VE back to plain old LXD/LXC
You can’t have failed to notice just how easy it’s become now to use a standard Ubuntu Linux install to manage and create Linux containers.
When I first started experimenting with these things, I was using Proxmox VE and it’s rather funky web frontend and plentiful custom scripts to manage my containers, and all was good.
Continue reading “Converting Containers from Proxmox-VE back to plain old LXD/LXC”
Static Compression with Brotli in .NET/Core
If there’s one thing that benefits web applications, it’s sending lots of data, faster.
To do this we’ve typically compressed our responses from the server to the client using a myriad of different schemes, the most popular of which has been GZIP.
Unfortunately, GZIP was conceived way back in the 1970’s under Unix, and has not been changed at all since then.
Continue reading “Static Compression with Brotli in .NET/Core”Security is HARD…
What can I say, we all know it’s true, if it was easy then there would be a lot more devs doing things correctly and a lot less data breeches these days.
Sometimes though, it seems like our development platform providers makes things far more difficult than they need to be, case fact was my experience recently with dotnet core and a blazor server side application…
Using a Full Framework SQL Server Project in a .NET core project build.
In this world of EFCore and migrations support that we have now, it’s hard to remember that at one time the primary means of performing SQL server database builds and changes was to use an “SQL Server” project type in visual studio.
In fact many newer devs who are only used to dotnet core might never have even seen the project type that I’m on about

Continue reading “Using a Full Framework SQL Server Project in a .NET core project build.”
A Little bit of Electronics Madness……
There’s a reason many of the members of my family call me a “Mad Professor”, ever since I was little I’ve had a habit of doing extreme experiments with electronics, and trying to use things in a way they where never really intended to be used.
On top of that, many folks that know me and/or follow my socials, know me better for my software exploits mostly using Microsoft’s .NET framework.
What many don’t know is that my degree is not actually in software, well not entirely anyway,
Continue reading “A Little bit of Electronics Madness……”
Using Dotnet Core Logging without using the DI container
Just before Christmas, one of our regular contributors to Lidnug posed the question on how to use the ILogger interface in dotnet core 3+ without injecting logger instances into classes used within a dotnet core application.
Continue reading “Using Dotnet Core Logging without using the DI container”
Making Blazor validation play nice with Bootstrap 4
There’s no doubt about it, blazor’s forms module and it’s validation features are fantastic.
You get all the benefits of using validation attributes on your models, along with a very fluid and real time UI model that works exactly the same in server and client modes.
There is however, one small problem with it all “Class Names”
Continue reading “Making Blazor validation play nice with Bootstrap 4”
Rediscovering Postgres and EF core
Its ok folks, you can relax, yes I’m not ill, yes I have gotten around to writing another blog post, yes I know…. I don’t write enough anymore and I should 🙂
With that out the way, why am I suddenly getting all excited about Postgres and EF again (specifically EF core)
Pure HTML Validation in Blazor
There’s been a lot of talk about Validation in the Blazor gitter chat recently.
The Blazor dev team have added some validation routines in that closley mimic the way validation works in ASP.NET MVC and many folks have been playing with them to see what they can do with them.
Chris Sainty has even produced a blog post [https://chrissainty.com/using-fluentvalidation-for-forms-validation-in-razor-components/] showing how to wire in the “Fluent Validation” libraries to make form validation even more awesome.
Continue reading “Pure HTML Validation in Blazor”
